在本文中,我们将看到 OpenCV 中的 Canny Edge 过滤器。 OpenCV 中的 Canny() 函数用于检测图像中的边。
用法:cv2.Canny(image, T_lower, T_upper, aperture_size, L2Gradient)
Where:
- 图像:将应用 Canny 过滤器的输入图像
- T_lower:Hysteresis Thresholding 中的下阈值
- T_upper:Hysteresis Thresholding中的上阈值
- aperture_size:Sobel 滤波器的孔径大小。
- L2Gradient:布尔参数,用于更精确地计算边梯度。
Canny 边检测是一个由 4 个主要步骤组成的算法:
- 使用高斯平滑减少噪声。
- 使用 Sobel 滤波器计算图像梯度。
- 应用非最大值抑制或 NMS 来仅吉普车局部最大值
- 最后,应用在 Canny() 函数中使用的 2 个阈值 T_upper 和 T_lower 的滞后阈值。
输入图像:

的基本示例Canny() 函数
Python3
import cv2
img = cv2.imread("test.jpeg") # Read image
# Setting parameter values
t_lower = 50 # Lower Threshold
t_upper = 150 # Upper threshold
# Applying the Canny Edge filter
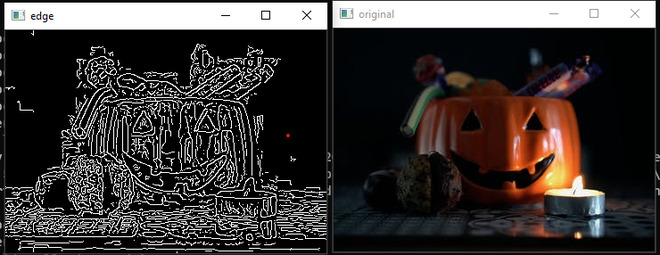
edge = cv2.Canny(img, t_lower, t_upper)
cv2.imshow('original', img)
cv2.imshow('edge', edge)
cv2.waitKey(0)
cv2.destroyAllWindows()输出:

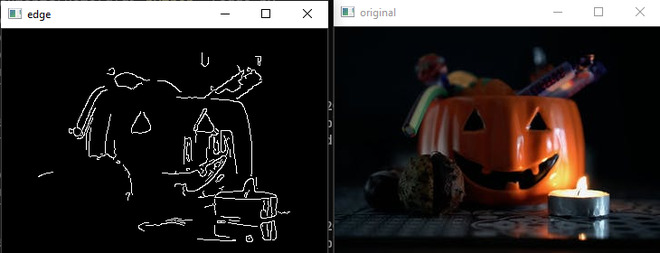
Canny() 函数与 Aperture_size
这是一个可选参数,用于指定用于计算 Canny 算法中的梯度的 Sobel 滤波器的阶数。默认值为 3,其值应为 3 到 7 之间的奇数。当您想要检测更详细的特征时,可以增加 Aperture 大小。
Python3
import cv2
img = cv2.imread("test.jpeg") # Read image
# Setting All parameters
t_lower = 100 # Lower Threshold
t_upper = 200 # Upper threshold
aperture_size = 5 # Aperture size
# Applying the Canny Edge filter
# with Custom Aperture Size
edge = cv2.Canny(img, t_lower, t_upper,
apertureSize=aperture_size)
cv2.imshow('original', img)
cv2.imshow('edge', edge)
cv2.waitKey(0)
cv2.destroyAllWindows()输出:
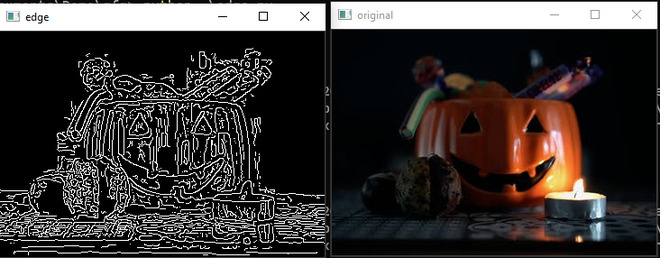
Canny() 函数使用 L2Gradient
这是一个布尔参数,指定您是要计算通常的梯度方程还是 L2Gradient 算法。同样,它是一个可选参数。 L2gradient 不是我的 sqrt(gradient_x_square + gradient_y_square),而 L1gradient 只是 abs(gradient_x) + abs(gradient_y)。
Python3
import cv2
img = cv2.imread("test.jpeg") # Read image
t_lower = 100 # Lower Threshold
t_upper = 200 # Upper threshold
aperture_size = 5 # Aperture size
L2Gradient = True # Boolean
# Applying the Canny Edge filter with L2Gradient = True
edge = cv2.Canny(img, t_lower, t_upper, L2gradient = L2Gradient )
cv2.imshow('original', img)
cv2.imshow('edge', edge)
cv2.waitKey(0)
cv2.destroyAllWindows()输出:
Canny() 函数具有孔径大小和 L2gradient
在这里,我们将在函数中使用这两个属性。
Python3
import cv2
img = cv2.imread("test.jpeg") # Read image
# Defining all the parameters
t_lower = 100 # Lower Threshold
t_upper = 200 # Upper threshold
aperture_size = 5 # Aperture size
L2Gradient = True # Boolean
# Applying the Canny Edge filter
# with Aperture Size and L2Gradient
edge = cv2.Canny(img, t_lower, t_upper,
apertureSize = aperture_size,
L2gradient = L2Gradient )
cv2.imshow('original', img)
cv2.imshow('edge', edge)
cv2.waitKey(0)
cv2.destroyAllWindows()输出:
相关用法
- Python Wand canny()用法及代码示例
- Python OpenCV setWindowTitle()用法及代码示例
- Python OpenCV resizeWindow()用法及代码示例
- Python OpenCV waitKey()用法及代码示例
- Python OpenCV waitKeyEx()用法及代码示例
- Python OpenCV getRotationMatrix2D()用法及代码示例
- Python OpenCV destroyAllWindows()用法及代码示例
- Python OpenCV namedWindow()用法及代码示例
- Python OpenCV selectroi()用法及代码示例
- Python OpenCV imdecode()用法及代码示例
- Python OpenCV getTrackbarPos()用法及代码示例
- Python OpenCV Filter2D()用法及代码示例
- Python OpenCV setTrackbarPos()用法及代码示例
- Python OpenCV getgaussiankernel()用法及代码示例
- Python OpenCV haveImageReader()用法及代码示例
注:本文由纯净天空筛选整理自ayushmankumar7大神的英文原创作品 Python OpenCV – Canny() Function。非经特殊声明,原始代码版权归原作者所有,本译文未经允许或授权,请勿转载或复制。